For SHM to occur we require stable equilibrium, about a point. For example, at
the origin we could have:
 which
would describe a system in equilibrium. This however is not necessarily stable
equilibrium.
which
would describe a system in equilibrium. This however is not necessarily stable
equilibrium.
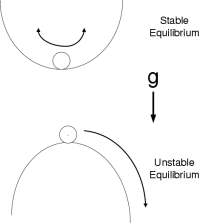
The lower part of the figure shows the case of unstable equilibrium. The upper part shows the case of stable equilibrium. These situations often occur in mechanical systems.
For example, consider a mass attached to a spring:
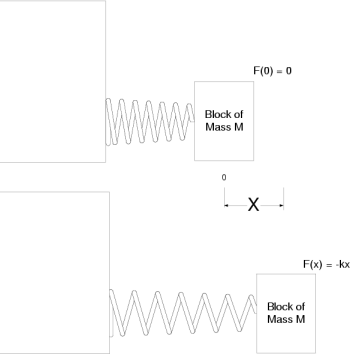
In general, in a case of stable equilibrium we can write the force as a
polynomial expansion:
F
(
x
)
=
−
(
k1x
+
k2x2
+
k3x3
+
…
)
where
the
ki
are positive constants. There is always a region of
x
small enough that we can write:
F
=
−
k
x
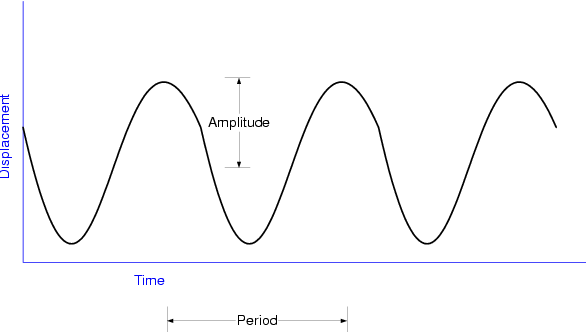
 This is satisfied by an equation of the form
x
=
A
sin
(
ωt
+
φ0
)
where
A
and
φ0
are constants that are determined by the initial conditions.
Draw a diagram of a sinusoid and mark on it the period T and Amplitude A
This is satisfied by an equation of the form
x
=
A
sin
(
ωt
+
φ0
)
where
A
and
φ0
are constants that are determined by the initial conditions.
Draw a diagram of a sinusoid and mark on it the period T and Amplitude A
φ0
Is an arbitrary phase which shifts the sinusoid.This is also
satisfied by an equation of the form
x
=
A
sin
(
ωt
)
+
B
cos
(
ωt
)
Lets
show this:
 Again
there are two constants determined by the initial conditions
A
and
B
The equation can be rewritten
Again
there are two constants determined by the initial conditions
A
and
B
The equation can be rewritten
 Thus
if
Thus
if
 then
the equation is identical to the SHM equation.
then
the equation is identical to the SHM equation.
So another way to write the equation of Simple Harmonic Motion is
 or
or

It is also important to remember the relationships between freqency, angular
frequency and period:

Another solution to the SHM equation is
 Recall Taylor's expansions of sine and cosine
Recall Taylor's expansions of sine and cosine

 Then
Then

(an alternative way to show this is the following)
Thus we can write
 as
as

We will use the complex representation a lot, so you need to become familiar with it. It is used a lot in Optics, Classical and Quantum Mechanics and Electrical Engineering so it is a good thing to know.
Now for physical systems we are interested in just the real
part so
 This
will be implicitly understood. In physics we just write
x
=
A
ei
(
ωt
+
φ0
)
One thing that will seem to be confusing is that there are all these different
solutions. They are all just different forms of the same thing. Which form is
used in a particular circumstance is simply a matter of convenience. Some
forms lend themselves to to solutions of certain problems more easily than
others. Also the most convenient form can depend upon the initial conditions.
For example if
x
is at its maximum displacement at time
t
=
0
then a
cos
form may be the most convenient. As a general rule I like using the complex
representation because natural logarithms are so easy to work with. For
example
This
will be implicitly understood. In physics we just write
x
=
A
ei
(
ωt
+
φ0
)
One thing that will seem to be confusing is that there are all these different
solutions. They are all just different forms of the same thing. Which form is
used in a particular circumstance is simply a matter of convenience. Some
forms lend themselves to to solutions of certain problems more easily than
others. Also the most convenient form can depend upon the initial conditions.
For example if
x
is at its maximum displacement at time
t
=
0
then a
cos
form may be the most convenient. As a general rule I like using the complex
representation because natural logarithms are so easy to work with. For
example

 which
is all pretty simple to remember
which
is all pretty simple to remember
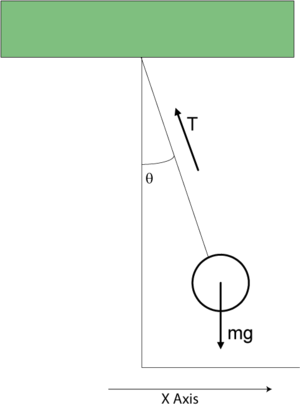
Shown
is a simple pendulum which has a mass
m
that is displaced by an angle
θ
.
There is tension
( )
in the string which acts from the mass to the anchor point. The weight of the
mass is
)
in the string which acts from the mass to the anchor point. The weight of the
mass is
 and the tension in the string is
T
=
m
g
cosθ
.
There is a tangential restoring force
=
−
m
g
sinθ
.
If we approximate that
θ
is small (we have to make this approximation or else we can not solve the
problem analytically) then
sinθ
≈
θ
and
x
=
lθ
.
(note that
sinθ
is only approximately equal to
and the tension in the string is
T
=
m
g
cosθ
.
There is a tangential restoring force
=
−
m
g
sinθ
.
If we approximate that
θ
is small (we have to make this approximation or else we can not solve the
problem analytically) then
sinθ
≈
θ
and
x
=
lθ
.
(note that
sinθ
is only approximately equal to
 because
x
is the distance along the
x
axis) so that we can write:
because
x
is the distance along the
x
axis) so that we can write:
 or
(Note
that We should immediately recongnize that this is the equation for simple
harmonic motion (SHM) with
or
(Note
that We should immediately recongnize that this is the equation for simple
harmonic motion (SHM) with
We could take another approach and use angular momentum to
solve the problem. Recall that:
I
=
m
l2
.
Also
recall that the torque is the time derivative of the angular momentum so that:
Again
we would recognize that this is simple harmonic motion with
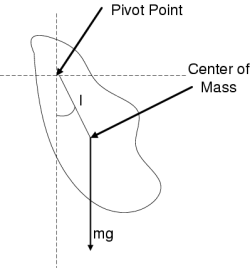
The compound pendulum is another interesting example of a pendulum that
undergoes simple harmonic motion. For an extended body then one uses the
center of mass and the moment of inertia. Use the center of mass, the moment
of inertia and the Torque (angular force)
So
again we get SHM now with
One
sees that this formalism can be applied to the simple pendulum (ignore the
string and one can consider the ball a point mass). The moment of inertia is
m
l2.
So we get
which
is just what we got before for the simple pendulum. We could write the
equation of motion for a simple pendulum
as:
θ
=
A
ei
(
ωt
+
φ0
)
where φ0 is determined by initial conditions.
A discussion of the Pendulum and Simple Harmonic Oscillator can be found at
One of the most important concepts we encounter in vibrations and waves is the
principle of superposition. Lets look at a couple of cases starting with
adding two motions with the same frequency but different phases. It is easiest
to calculate this if you use complex notation
This comes up all the time in real life: For example noise canceling
headphones use this technique. In headphones there is a membrane vibrating
with the frequency of the sound you are listening two. In a noise canceling
headphone there is also a microphone "listening" to the noice coming from
outside the headphone. This oscillation is inverted and then added to membrane
producing the sound you listen to. The net result is a signal that contains
the desired sound and subtracts the noise resulting in quieter operation.
One can also consider the case of two oscillations with the same phase but
different
frequencies: In an acoustical system, this gives beats, which is more easily seen if we
take the case where
A1
=
A2
≡
A
,
then:
Where
the last step used
In an acoustical system, this gives beats, which is more easily seen if we
take the case where
A1
=
A2
≡
A
,
then:
Where
the last step used
 So
in an acoustical system we will get a dominant sound that has the average of
the two frequencies and and envelope of amplitude that slowly oscillates.
This will be looked at more closes in the context of mechanical waves.
So
in an acoustical system we will get a dominant sound that has the average of
the two frequencies and and envelope of amplitude that slowly oscillates.
This will be looked at more closes in the context of mechanical waves.
Recall that the total energy of a system is: E = KE + PE = K + U We also know that the kinetic energy is
But
what is
U
?
For a conservative Force
()
- eg. gravity, electrical... (no friction) we know that the work done by an
external force is stored as
U
.
For the case of a mass on a spring, the external force is opposite the spring
Force (That is it has the opposite sign from the spring force).:
Fext
=
kx
(i.e.
This is the force you use to pull the mass and stretch the spring before
letting go and making it oscillate.)
Thus
 This
gives:
This
gives:
 It is important to realize that any system that is represented by
either of these two equations below represents oscillating system
It is important to realize that any system that is represented by
either of these two equations below represents oscillating system

To calculate the energy in the system it is helpful to take advantage of the
fact that we can calculate the energy at any point in x. For example in the
case of the simple harmonic oscillator we have
that:
x
=
A
ei
(
ωt
+
α
)
We
can choose
t
such
that
x
=
A
Now remember that when I write
x
=
A
ei
(
ωt
+
α
)
I
"really" (pun intended) mean
Likewise
then
At the point in time where
x
=
A
this gives us