Chapter 6
Programming Shared-Memory Multiprocessors
6.1 Introduction1
6.1.1 Programming Shared-Memory Multiprocessors
In Chapter 10, Shared-Memory Multiprocessors, we examined the hardware used to implement shared– memory parallel processors and the software environment for a programmer who is using threads explicitly.
In this chapter, we view these processors from a simpler vantage point. When programming these systems in FORTRAN, you have the advantage of the compiler's support of these systems. At the top end of ease of use, we can simply add a ag or two on the compilation of our well-written code, set an environment variable, and voilá, we are executing in parallel. If you want some more control, you can add directives to particular loops where you know better than the compiler how the loop should be executed.2 First we examine how well-written loops can benet from automatic parallelism. Then we will look at the types of directives you can add to your program to assist the compiler in generating parallel code. While this chapter refers to running your code in parallel, most of the techniques apply to the vector-processor supercomputers as well.
6.2 Automatic Parallelization3
6.2.1 Automatic Parallelization
So far in the book, we've covered the tough things you need to know to do parallel processing. At this point, assuming that your loops are clean, they use unit stride, and the iterations can all be done in parallel, all you have to do is turn on a compiler ag and buy a good parallel processor. For example, look at the following code:
PARAMETER(NITER=300,N=1000000)
1This content is available online at <http://cnx.org/content/m32812/1.1/>.
2If you have skipped all the other chapters in the book and jumped to this one, don't be surprised if some of the terminology is unfamiliar. While all those chapters seemed to contain endless boring detail, they did contain some basic terminology. So those of us who read all those chapters have some common terminology needed for this chapter. If you don't go back and read all the chapters, don't complain about the big words we keep using in this chapter!
3This content is available online at <http://cnx.org/content/m32821/1.1/>.
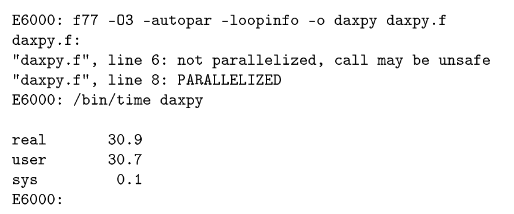
Here we have an iterative code that satises all the criteria for a good parallel loop. On a good parallel processor with a modern compiler, you are two ags away from executing in parallel. On Sun Solaris
systems, the autopar ag turns on the automatic parallelization, and the loopinfo ag causes the compiler to describe the particular optimization performed for each loop. To compile this code under Solaris, you simply add these ags to your f77 call:
If you simply run the code, it's executed using one thread. However, the code is enabled for parallel processing for those loops that can be executed in parallel. To execute the code in parallel, you need to set the UNIX environment to the number of parallel threads you wish to use to execute the code. On Solaris, this is done using the PARALLEL variable:
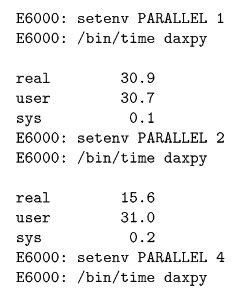
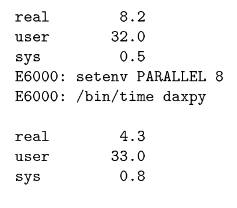
Speedup is the term used to capture how much faster the job runs using N processors compared to the
performance on one processor. It is computed by dividing the single processor time by the multiprocessor time for each number of processors. Figure 6.1 (Figure 11-1: Improving performance by adding processors) shows the wall time and speedup for this application.
Figure 11-1: Improving performance by adding processors
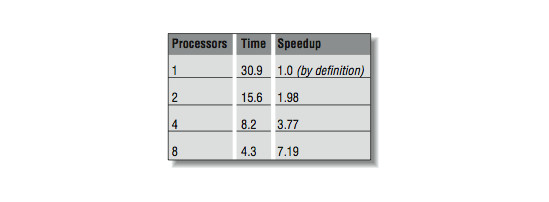
Figure 6.1
Figure 6.2 (Figure 11-2: Ideal and actual performance improvement) shows this information graphically, plotting speedup versus the number of processors.
Figure 11-2: Ideal and actual performance improvement
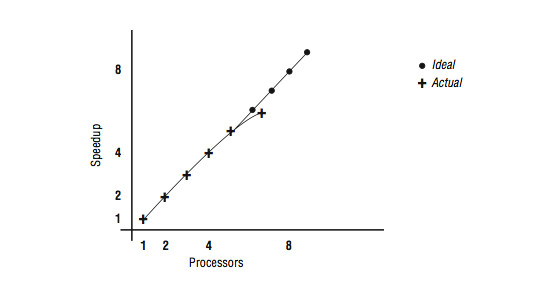
Figure 6.2
Note that for a while we get nearly perfect speedup, but we begin to see a measurable drop in speedup at four and eight processors. There are several causes for this. In all parallel applications, there is some portion of the code that can't run in parallel. During those nonparallel times, the other processors are waiting for work and aren't contributing to eciency. This nonparallel code begins to aect the overall performance as more processors are added to the application.
So you say, this is more like it! and immediately try to run with 12 and 16 threads. Now, we see the graph in Figure 6.4 (Figure 11-4: Diminishing returns) and the data from Figure 6.3 (Figure 11-3: Increasing the number of threads).
Figure 11-3: Increasing the number of threads
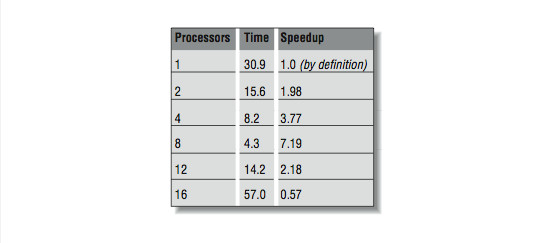
Figure 6.3
Figure 11-4: Diminishing returns
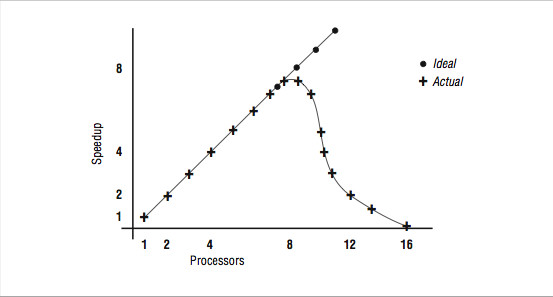
Figure 6.4
What has happened here? Things were going so well, and then they slowed down. We are running this program on a 16-processor system, and there are eight other active threads, as indicated below:
E6000:uptime
4:00pm up 19 day(s), 37 min(s), 5 users, load average: 8.00, 8.05, 8.14
E6000:
Once we pass eight threads, there are no available processors for our threads. So the threads must be time-shared between the processors, signicantly slowing the overall operation. By the end, we are executing 16 threads on eight processors, and our performance is slower than with one thread. So it is important that you don't create too many threads in these types of applications.4
6.2.1.1 Compiler Considerations
Improving performance by turning on automatic parallelization is an example of the smarter compiler we discussed in earlier chapters. The addition of a single compiler ag has triggered a great deal of analysis on the part of the compiler including:
• Which loops can execute in parallel, producing the exact same results as the sequential executions of the loops? This is done by checking for dependencies that span iterations. A loop with no interiteration dependencies is called a DOALL loop.
• Which loops are worth executing in parallel? Generally very short loops gain no benet and may
execute more slowly when executing in parallel. As with loop unrolling, parallelism always has a cost.
It is best used when the benet far outweighs the cost.
• In a loop nest, which loop is the best candidate to be parallelized? Generally the best performance occurs when we parallelize the outermost loop of a loop nest. This way the overhead associated with beginning a parallel loop is amortized over a longer parallel loop duration.
• Can and should the loop nest be interchanged? The compiler may detect that the loops in a nest can be done in any order. One order may work very well for parallel code while giving poor memory performance. Another order may give unit stride but perform poorly with multiple threads. The compiler must analyze the cost/benet of each approach and make the best choice.
• How do we break up the iterations among the threads executing a parallel loop? Are the iterations short with uniform duration, or long with wide variation of execution time? We will see that there are a number of dierent ways to accomplish this. When the programmer has given no guidance, the compiler must make an educated guess.
Even though it seems complicated, the compiler can do a surprisingly good job on a wide variety of codes.
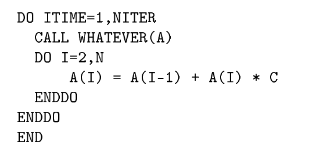
It is not magic, however. For example, in the following code we have a loop-carried ow dependency:
PROGRAM DEP
PARAMETER(NITER=300,N=1000000)
REAL*4 A(N)
4In Appendix D, How FORTRAN Manages Threads at Runtime, when we look at how the FORTRAN runtime library operates on these systems it will be much clearer why having more threads than avail- able processors has such a negative impact on performance.
When we compile the code, the compiler gives us the following message:
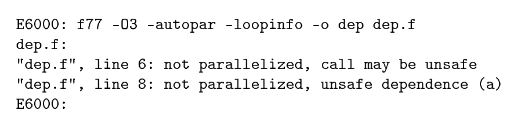
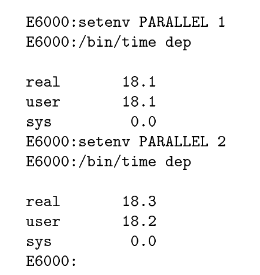
The compiler throws its hands up in despair, and lets you know that the loop at Line 8 had an unsafe dependence, and so it won't automatically parallelize the loop. When the code is executed below, adding a thread does not aect the execution performance:
A typical application has many loops. Not all the loops are executed in parallel. It's a good idea to run a prole of your application, and in the routines that use most of the CPU time, check to nd out which loops are not being parallelized. Within a loop nest, the compiler generally chooses only one loop to execute in parallel.
6.2.1.2 Other Compiler Flags
In addition to the ags shown above, you may have other compiler ags available to you that apply across the entire program:
• You may have a compiler ag to enable the automatic parallelization of reduction operations. Because the order of additions can aect the nal value when computing a sum of oating-point numbers, the compiler needs permission to parallelize summation loops.
• Flags that relax the compliance with IEEE oating-point rules may also give the compiler more exibility when trying to parallelize a loop. However, you must be sure that it's not causing accuracy problems in other areas of your code.
• Often a compiler has a ag called unsafe optimization or assume no dependencies. While this ag may indeed enhance the performance of an application with loops that have dependencies, it almost certainly produces incorrect results.
There is some value in experimenting with a compiler to see the particular combination that will yield good performance across a variety of applications. Then that set of compiler options can be used as a starting point when you encounter a new application.
6.3 Assisting the Compiler5
6.3.1 Assisting the Compiler
If it were all that simple, you wouldn't need this book. While compilers are extremely clever, there is still a lot of ways to improve the performance of your code without sacricing its portability. Instead of converting the whole program to C and using a thread library, you can assist the compiler by adding compiler directives to our source code.
Compiler directives are typically inserted in the form of stylized FORTRAN comments. This is done so that a nonparallelizing compiler can ignore them and just look at the FORTRAN code, sans comments.
This allows to you tune your code for parallel architectures without letting it run badly on a wide range of single-processor systems.
There are two categories of parallel-processing comments:
• Assertions
• Manual parallelization directives
Assertions tell the compiler certain things that you as the programmer know about the code that it might not guess by looking at the code. Through the assertions, you are attempting to assuage the compiler's doubts about whether or not the loop is eligible for parallelization. When you use directives, you are taking full responsibility for the correct execution of the program. You are telling the compiler what to parallelize and how to do it. You take full responsibility for the output of the program. If the program produces meaningless results, you have no one to blame but yourself.
6.3.1.1 Assertions
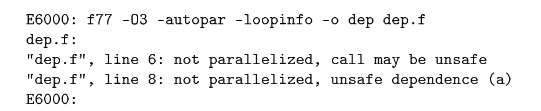
In a previous example, we compiled a program and received the following output:
5This content is available online at <http://cnx.org/content/m32814/1.1/>.
An uneducated programmer who has not read this book (or has not looked at the code) might exclaim, What unsafe dependence, I never put one of those in my code! and quickly add a no dependencies assertion. This is the essence of an assertion. Instead of telling the compiler to simply parallelize the loop, the programmer is telling the compiler that its conclusion that there is a dependence is incorrect. Usually the net result is that the compiler does indeed parallelize the loop.
We will briey review the types of assertions that are typically supported by these compilers. An assertion is generally added to the code using a stylized comment.
6.3.1.1.1 No dependencies
A no dependencies or ignore dependencies directive tells the compiler that references don't overlap.
That is, it tells the compiler to generate code that may execute incorrectly if there are dependencies. You're saying, I know what I'm doing; it's OK to overlap references. A no dependencies directive might help the following loop:
DO I=1,N
A(I) = A(I+K) * B(I)
ENDDO
If you know that k is greater than -1 or less than -n, you can get the compiler to parallelize the loop: C$ASSERT NO_DEPENDENCIES
DO I=1,N
A(I) = A(I+K) * B(I)
ENDDO
Of course, blindly telling the compiler that there are no dependencies is a prescription for disaster. If k equals -1, the example above becomes a recursive loop.
6.3.1.1.2 Relations
You will often see loops that contain some potential dependencies, making them bad candidates for a no dependencies directive. However, you may be able to supply some local facts about certain variables. This allows partial parallelization without compromising the results. In the code below, there are two potential dependencies because of subscripts involving k and j:
for (i=0; i<n; i++) '7b
a[i] = a[i+k] * b[i];
c[i] = c[i+j] * b[i];
'7d
Perhaps we know that there are no conicts with references to a[i] and a[i+k]. But maybe we aren't so sure about c[i] and c[i+j]. Therefore, we can't say in general that there are no dependencies. However, we may be able to say something explicit about k (like k is always greater than -1), leaving j out of it. This information about the relationship of one expression to another is called a relation assertion. Applying a relation assertion allows the compiler to apply its optimization to the rst statement in the loop, giving us partial parallelization.6
Again, if you supply inaccurate testimony that leads the compiler to make unsafe optimizations, your answer may be wrong.
6.3.1.1.3 Permutations
As we have seen elsewhere, when elements of an array are indirectly addressed, you have to worry about whether or not some of the subscripts may be repeated. In the code below, are the values of K(I) all unique?
Or are there duplicates?
DO I=1,N
A(K(I)) = A(K(I)) + B(I) * C
END DO
If you know there are no duplicates in K (i.e., that A(K(I)) is a permutation), you can inform the compiler so that iterations can execute in parallel. You supply the information using a permutation assertion.
6.3.1.1.4 No equivalences
Equivalenced arrays in FORTRAN programs provide another challenge for the compiler. If any elements of two equivalenced arrays appear in the same loop, most compilers assume that references could point to the same memory storage location and optimize very conservatively. This may be true even if it is abundantly apparent to you that there is no overlap whatsoever.
You inform the compiler that references to equivalenced arrays are safe with a no equivalences assertion.
Of course, if you don't use equivalences, this assertion has no eect.
6.3.1.1.5 Trip count
Each loop can be characterized by an average number of iterations. Some loops are never executed or go around just a few times. Others may go around hundreds of times:
C$ASSERT TRIPCOUNT>100
DO I=L,N
A(I) = B(I) + C(I)
END DO
Your compiler is going to look at every loop as a candidate for unrolling or parallelization. It's working in the dark, however, because it can't tell which loops are important and tries to optimize them all. This can lead to the surprising experience of seeing your runtime go up after optimization!
6Notice that, if you were tuning by hand, you could split this loop into two: one parallelizable and one not.
A trip count assertion provides a clue to the compiler that helps it decide how much to unroll a loop or when to parallelize a loop.7 Loops that aren't important can be identied with low or zero trip counts.
Important loops have high trip counts.
6.3.1.1.6 Inline substitution
If your compiler supports procedure inlining, you can use directives and command-line switches to specify how many nested levels of procedures you would like to inline, thresholds for procedure size, etc. The vendor will have chosen reasonable defaults.
Assertions also let you choose subroutines that you think are good candidates for inlining. However, subject to its thresholds, the compiler may reject your choices. Inlining could expand the code so much that increased memory activity would claim back gains made by eliminating the procedure call. At higher optimization levels, the compiler is often capable of making its own choices for inlining candidates, provided it can nd the source code for the routine under consideration.
Some compilers support a feature called interprocedural analysis. When this is done, the compiler looks across routine boundaries for its data ow analysis. It can perform signicant optimizations across routine boundaries, including automatic inlining, constant propagation, and others.
6.3.1.1.7 No side eects
Without interprocedural analysis, when looking at a loop, if there is a subroutine call in the middle of the loop, the compiler has to treat the subroutine as if it will have the worst possible side eects. Also, it has to assume that there are dependencies that prevent the routine from executing simultaneously in two dierent threads.
Many routines (especially functions) don't have any side eects and can execute quite nicely in separate threads because each thread has its own private call stack and local variables. If the routine is meaty, there will be a great deal of benet in executing it in parallel.
Your computer may allow you to add a directive that tells you if successive sub-routine calls are independent:
C$ASSERT NO_SIDE_EFFECTS
DO I=1,N
CALL BIGSTUFF (A,B,C,I,J,K)
END DO
Even if the compiler has all the source code, use of common variables or equivalences may mask call independence.
6.3.1.2 Manual Parallelism
At some point, you get tired of giving the compiler advice and hoping that it will reach the conclusion to parallelize your loop. At that point you move into the realm of manual parallelism. Luckily the programming model provided in FORTRAN insulates you from much of the details of exactly how multiple threads are
managed at runtime. You generally control explicit parallelism by adding specially formatted comment lines to your source code. There are a wide variety of formats of these directives. In this section, we use the syntax that is part of the OpenMP (see 8 ) standard. You generally nd similar capabilities in each of the 7The assertion is made either by hand or from a proler.
8http://cnx.org/content/m32814/latest/www.openmp.org
vendor compilers. The precise syntax varies slightly from vendor to vendor. (That alone is a good reason to have a standard.)
The basic programming model is that you are executing a section of code with either a single thread or multiple threads. The programmer adds a directive to summon additional threads at various points in the code. The most basic construct is called the parallel region.
6.3.1.2.1 Parallel regions
In a parallel region, the threads simply appear between two statements of straight-line code. A very trivial example might be the following using the OpenMP directive syntax:
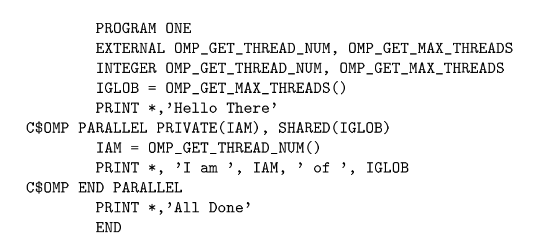
The C$OMP is the sentinel that indicates that this is a directive and not just another comment. The output of the program when run looks as follows:
% setenv OMP_NUM_THREADS 4
% a.out
Hello There
I am 0 of 4
I am 3 of 4
I am 1 of 4
I am 2 of 4
All Done
%
Execution begins with a single thread. As the program encounters the PARALLEL directive, the other threads are activated to join the computation. So in a sense, as execution passes the rst directive, one thread becomes four. Four threads execute the two statements between the directives. As the threads are executing independently, the order in which the print statements are displayed is somewhat random. The threads wait at the END PARALLEL directive until all threads have arrived. Once all threads have completed the parallel region, a single thread continues executing the remainder of the program.
In Figure 6.5 (Figure 11-5: data interactions during a parallel region), the PRIVATE(IAM) indicates that the IAM variable is not shared across all the threads but instead, each thread has its own private version of the variable. The IGLOB variable is shared across all the threads. Any modication of IGLOB appears in all the other threads instantly, within the limitations of the cache coherency.
Figure 11-5: data interactions during a parallel region
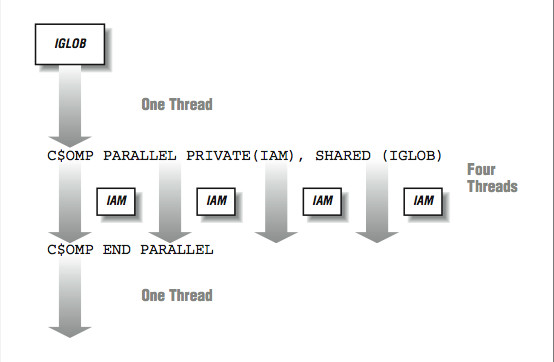
Figure 6.5
During the parallel region, the programmer typically divides the work among the threads. This pattern of going from single-threaded to multithreaded execution may be repeated many times throughout the execution of an application.
Because input and output are generally not thread-safe, to be completely correct, we should indicate that the print statement in the parallel section is only to be executed on one processor at any one time. We use a directive to indicate that this section of code is a critical section. A lock or other synchronization mechanism ensures that no more than one processor is executing the statements in the critical section at any one time:
C$OMP CRITICAL
PRINT *, 'I am ', IAM, ' of ', IGLOB
C$OMP END CRITICAL
6.3.1.2.2 Parallel loops
Quite often the areas of the code that are most valuable to execute in parallel are loops. Consider the following loop:
DO I=1,1000000
TMP1 = ( A(I) ** 2 ) + ( B(I) ** 2 )
TMP2 = SQRT(TMP1)
B(I) = TMP2
ENDDO
To manually parallelize this loop, we insert a directive at the beginning of the loop:
C$OMP PARALLEL DO
DO I=1,1000000
TMP1 = ( A(I) ** 2 ) + ( B(I) ** 2 )
TMP2 = SQRT(TMP1)
B(I) = TMP2
ENDDO
C$OMP END PARALLEL DO
When this statement is encountered at runtime, the single thread again summons the other threads to join the computation. However, before the threads can start working on the loop, there are a few details that must be handled. The PARALLEL DO directive accepts the data classication and scoping clauses as in the parallel section directive earlier. We must indicate which variables are shared across all threads and which variables have a separate copy in each thread. It would be a disaster to have TMP1 and TMP2 shared across threads. As one thread takes the square root of TMP1, another thread would be resetting the contents of TMP1. A(I) and B(I) come from outside the loop, so they must be shared. We need to augment the directive as follows:
C$OMP PARALLEL DO SHARED(A,B) PRIVATE(I,TMP1,TMP2)
DO I=1,1000000
TMP1 = ( A(I) ** 2 ) + ( B(I) ** 2 )
TMP2 = SQRT(TMP1)
B(I) = TMP2
ENDDO
C$OMP END PARALLEL DO
The iteration variable I also must be a thread-private variable. As the dierent threads increment their way through their particular subset of the arrays, they don't want to be modifying a global value for I.
There are a number of other options as to how data will be operated on across the threads. This summarizes some of the other data semantics available:
Firstprivate: These are thread-private variables that take an initial value from the global variable of the same name immediately before the loop begins executing.
Lastprivate: These are thread-private variables except that the thread that executes the last iteration of the loop copies its value back into the global variable of the same name.
Reduction: This indicates that a variable participates in a reduction operation that can be safely done in parallel. This is done by forming a partial reduction using a local variable in each thread and then combining the partial results at the end of the loop.
Each vendor may have dierent terms to indicate these data semantics, but most support all of these common semantics. Figure 6.6 (Figure 11-6: Variables during a parallel region) shows how the dierent types of data semantics operate.
Now that we have the data environment set up for the loop, the only remaining problem that must be solved is which threads will perform which iterations. It turns out that this is not a trivial task, and a wrong choice can have a signicant negative impact on our overall performance.
6.3.1.2.3 Iteration scheduling
There are two basic techniques (along with a few variations) for dividing the iterations in a loop between threads. We can look at two extreme examples to get an idea of how this works:
C VECTOR ADD
DO IPROB=1,10000
A(IPROB) = B(IPROB) + C(IPROB)
ENDDO
C PARTICLE TRACKING
DO IPROB=1,10000
RANVAL = RAND(IPROB)
CALL ITERATE_ENERGY(RANVAL) ENDDO
ENDDO
Figure 11-6: Variables during a parallel region
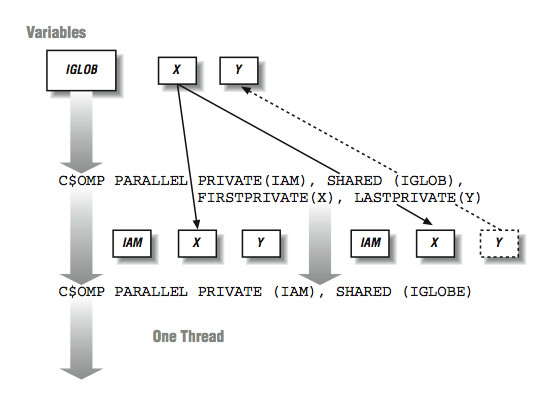
Figure 6.6
In both loops, all the computations are independent, so if there were 10,000 processors, each processor could execute a single iteration. In the vector-add example, each iteration would be relatively short, and the execution time would be relatively constant from iteration to iteration. In the particle tracking example, each iteration chooses a random number for an initial particle position and iterates to nd the minimum energy.
Each iteration takes a relatively long time to complete, and there will be a wide variation of completion times from iteration to iteration.
These two examples are eectively the ends of a continuous spectrum of the iteration scheduling challenges facing the FORTRAN parallel runtime environment:
Static
At the beginning of a parallel loop, each thread takes a xed continuous portion of iterations of the loop based on the number of threads executing the loop.
Dynamic
With dynamic scheduling, each thread processes a chunk of data and when it has completed processing, a new chunk is processed. The chunk size can be varied by the programmer, but is xed for the duration of the loop.
These two example loops can show how these iteration scheduling approaches might operate when executing with four threads. In the vector-add loop, static scheduling would distribute iterations 12500 to Thread 0, 25015000 to Thread 1, 50017500 to Thread 2, and 750110000 to Thread 3. In Figure 6.7
(Figure 11-7: Iteration assignment for static scheduling), the mapping of iterations to threads is shown for the static scheduling option.
Figure 11-7: Iteration assignment for static scheduling
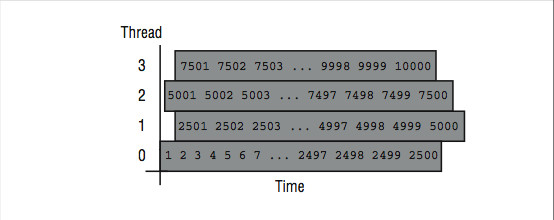
Figure 6.7
Since the loop body (a single statement) is short with a consistent execution time, static scheduling should result in roughly the same amount of overall work (and time if you assume a dedicated CPU for each thread) assigned to each thread per loop execution.
An advantage of static scheduling may occur if the entire loop is executed repeatedly. If the same iterations are assigned to the same threads that happen to be running on the same processors, the cache might actually contain the values for A, B, and C from the previous loop execution.9 The runtime pseudo-code for static scheduling in the rst loop might look as follows:
C VECTOR ADD - Static Scheduled
ISTART = (THREAD_NUMBER * 2500 ) + 1
IEND = ISTART + 2499
DO ILOCAL = ISTART,IEND
A(ILOCAL) = B(ILOCAL) + C(ILOCAL)
ENDDO
It's not always a good strategy to use the static approach of giving a xed number of iterations to each thread. If this is used in the second loop example, long and varying iteration times would result in poor load