
























































































































































478
Parallel Manipulators, Towards New Applications
kactuationl, which is apparent when the reactions to the right and left wheels from the road
surface are different, and which often occurs when the vehicle makes a right or left turn.
Ring Gear
Right :heel
Left :heel
Side Gear
Right Axle Shaft
Left Axle Shaft
Spider Gear
Aehicle Body
Pinion Gear
MoDing Direction
MoDing Direction
Fig. 3 the differential gear train mechanism
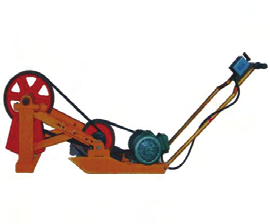
Another facility usually used in civil engineering is the inertial rammer shown in Fig. 4. This
can also be modelled with a planar mechanism shown in Fig. 5. The apparent actuation is
provided by the eccentric force of the eccentric rotor under the actuation of the electric
motor. However, the motion of the rammer’s body is indeterminate if the control of >
4 is
not exerted to the handle. Therefore, the inertia rammer is not an underactuated mechanical
system but a fully actuated system although the apparent actuation seems to be restricted to
the eccentric force resulting from the eccentric rotating rotor.
Fh
Fa5 me" 2
/andle
Road Surface
/ammer
Rammer Brace
Fig. 4 the inertia rammer Fig. 5 the mechanism of the inertia rammer
From the above analysis, it is not difficult to find that all the underactuated mechanical
systems are substantially actuation determinate from the viewpoint of mechanisms.






























































































