variance is
Note that in general, each Hi( w) , and thus the variance at the
output due to each quantizer, is different; for example, the system as seen by a quantizer at the
input to the first delay state in the Direct-Form II IIR filter structure to the output, call it n 4 , is
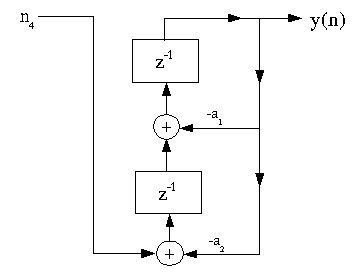
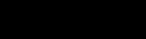
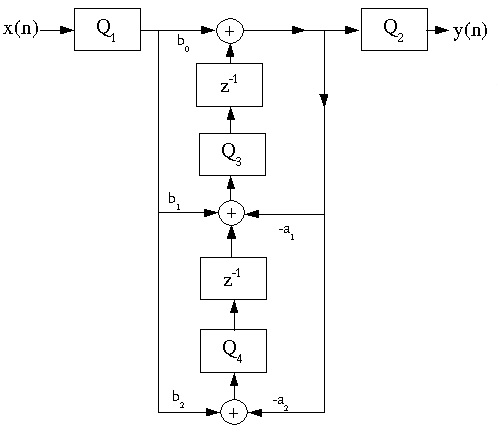
Figure 6.28.
with a transfer function
which can be evaluated at z= ⅇⅈw to obtain the frequency
response.
A general approach to find Hi( w) is to write state equations for the equivalent structure as seen by
ni , and to determine the transfer function according to H( z)= C( zI− A)-1 B+ d .
Figure 6.29.
Exercise 5.
The above figure illustrates the quantization points in a typical implementation of a Direct-Form





The above figure illustrates the quantization points in a typical implementation of a Direct-Form
II IIR second-order section. What is the total variance of the output error due to all of the
quantizers in the system?
By making the assumption that each Qi represents a noise source that is white, independent of the
other sources, and additive,
Figure 6.30.
the variance at the output is the sum of the variances at the output due to each noise source:
The variance due to each noise source at the output can be determined from
; note that S
2
n ( w)= σ
by our assumptions, and H
i
ni
i( w) is the transfer function
from the noise source to the output.
IIR Coefficient Quantization Analysis*
Coefficient quantization is an important concern with IIR filters, since straigthforward
quantization often yields poor results, and because quantization can produce unstable filters.
Sensitivity analysis
The performance and stability of an IIR filter depends on the pole locations, so it is important to
know how quantization of the filter coefficients ak affects the pole locations pj . The denominator
polynomial is
We wish to know
, which, for small deviations,
will tell us that a δ change in ak yields an
change in the pole location.
is the
sensitivity of the pole location to quantization of ak . We can find
using the chain rule.
⇓
which is
()
Note that as the poles get closer together, the sensitivity increases greatly. So as the filter order
increases and more poles get stuffed closer together inside the unit circle, the error introduced by
coefficient quantization in the pole locations grows rapidly.
How can we reduce this high sensitivity to IIR filter coefficient quantization?
Solution
Cascade or parallel form implementations! The numerator and denominator polynomials can be factored off-line at very high precision and grouped into second-order sections, which are then
quantized section by section. The sensitivity of the quantization is thus that of second-order,
rather than N-th order, polynomials. This yields major improvements in the frequency response of
the overall filter, and is almost always done in practice.
Note that the numerator polynomial faces the same sensitivity issues; the cascade form also
improves the sensitivity of the zeros, because they are also factored into second-order terms.
However, in the parallel form, the zeros are globally distributed across the sections, so they suffer
from quantization of all the blocks. Thus the cascade form preserves zero locations much better
than the parallel form, which typically means that the stopband behavior is better in the cascade
form, so it is most often used in practice.
Note on FIR Filters
On the basis of the preceding analysis, it would seem important to use cascade structures in
FIR filter implementations. However, most FIR filters are linear-phase and thus symmetric or
anti-symmetric. As long as the quantization is implemented such that the filter coefficients
retain symmetry, the filter retains linear phase. Furthermore, since all zeros off the unit circle
must appear in groups of four for symmetric linear-phase filters, zero pairs can leave the unit
circle only by joining with another pair. This requires relatively severe quantizations (enough
to completely remove or change the sign of a ripple in the amplitude response). This
"reluctance" of pole pairs to leave the unit circle tends to keep quantization from damaging
the frequency response as much as might be expected, enough so that cascade structures are
rarely used for FIR filters.


What is the worst-case pole pair in an IIR digital filter?
The pole pair closest to the real axis in the z-plane, since the complex-conjugate poles will be
closest together and thus have the highest sensitivity to quantization.
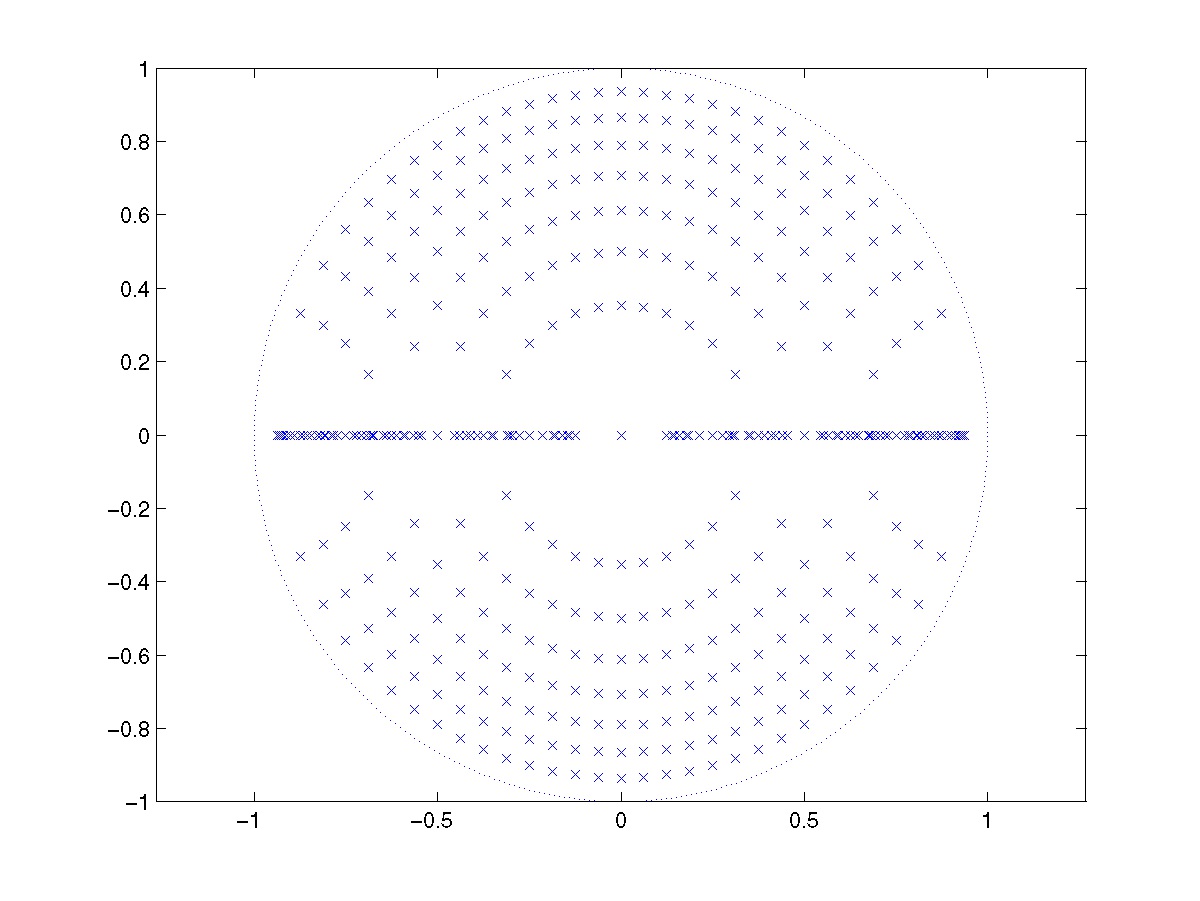
Quantized Pole Locations
In a direct-form or transpose-form implementation of a second-order section, the filter coefficients are quantized versions of the polynomial coefficients.
p= rⅇⅈθ D( z)= z 2−2 r cos( θ)+ r 2 So a 1=–(2 r cos( θ)) a 2= r 2 Thus the quantization of a 1 and a 2 to B bits restricts the radius r to
, and a 1=–(2Re( p))= kΔB The following figure
shows all stable pole locations after four-bit two's-complement quantization.

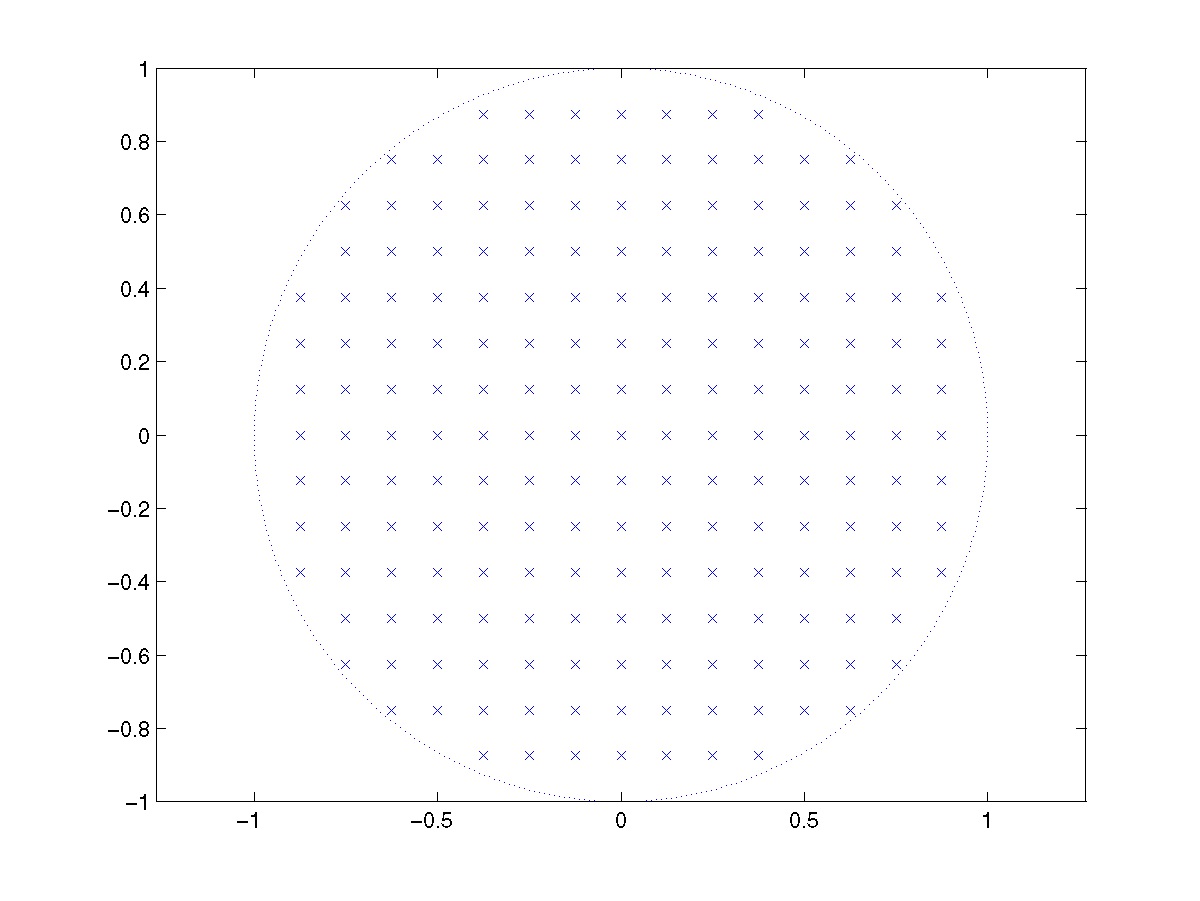

Figure 6.31.
Note the nonuniform distribution of possible pole locations. This might be good for poles near
r=1 ,
, but not so good for poles near the origin or the Nyquist frequency.
In the "normal-form" structures, a state-variable based realization, the poles are uniformly spaced.
Figure 6.32.
This can only be accomplished if the coefficients to be quantized equal the real and imaginary
parts of the pole location; that is, α 1= r cos( θ)=Re( r) α 2= r sin( θ)=Im( p) This is the case for a 2nd-order system with the state matrix
: The denominator polynomial is

()
Given any second-order filter coefficient set, we can write it as a state-space system, find a
transformation matrix T such that
is in normal form, and then implement the second-
order section using a structure corresponding to the state equations.
The normal form has a number of other advantages; both eigenvalues are equal, so it minimizes
the norm of Ax , which makes overflow less likely, and it minimizes the output variance due to
quantization of the state values. It is sometimes used when minimization of finite-precision
effects is critical.
What is the disadvantage of the normal form?
It requires more computation. The general state-variable equation requires nine multiplies,
rather than the five used by the Direct-Form II or Transpose-Form structures.
6.4. Overflow Problems and Solutions
Limit Cycles*
Large-scale limit cycles
When overflow occurs, even otherwise stable filters may get stuck in a large-scale limit cycle,
which is a short-period, almost full-scale persistent filter output caused by overflow.
Example 6.3.
Consider the second-order system
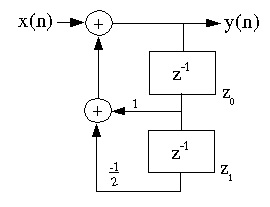




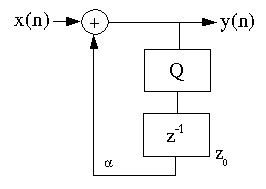


Figure 6.33.
with zero input and initial state values z 0[0]=0.8 , z 1[0]=-0.8 . Note y[ n]= z 0[ n+1] .
The filter is obviously stable, since the magnitude of the poles is
, which is well inside
the unit circle. However, with wraparound overflow, note that
, and
that
, so
even with zero input.
Clearly, such behavior is intolerable and must be prevented. Saturation arithmetic has been proved
to prevent zero-input limit cycles, which is one reason why all DSP microprocessors support this
feature. In many applications, this is considered sufficient protection. Scaling to prevent overflow
is another solution, if as well the inital state values are never initialized to limit-cycle-producing
values. The normal-form structure also reduces the chance of overflow.
Small-scale limit cycles
Small-scale limit cycles are caused by quantization. Consider the system
Figure 6.34.
Note that when
, rounding will quantize the output to the current level (with zero input),
so the output will remain at this level forever. Note that the maximum amplitude of this "small-
scale limit cycle" is achieved when
In a higher-order system, the
small-scale limit cycles are oscillatory in nature. Any quantization scheme that never increases



the magnitude of any quantized value prevents small-scale limit cycles.
Two's-complement truncation does not do this; it increases the magnitude of negative
numbers.
However, this introduces greater error and bias. Since the level of the limit cycles is proportional
to ΔB , they can be reduced by increasing the number of bits. Poles close to the unit circle increase
the magnitude and likelihood of small-scale limit cycles.
Scaling*
Overflow is clearly a serious problem, since the errors it introduces are very large. As we shall
see, it is also responsible for large-scale limit cycles, which cannot be tolerated. One way to
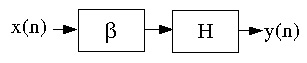
prevent overflow, or to render it acceptably unlikely, is to scale the input to a filter such that
overflow cannot (or is sufficiently unlikely to) occur.
Figure 6.35.
In a fixed-point system, the range of the input signal is limited by the fractional fixed-point
number representation to | x[ n]|≤1 . If we scale the input by multiplying it by a value β, 0< β<1 , then | βx[ n]|≤ β .
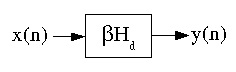
Another option is to incorporate the scaling directly into the filter coefficients.
Figure 6.36.
FIR Filter Scaling
What value of β is required so that the output of an FIR filter cannot overflow ( | y( n)|≤1 ,
| x( n)|≤1 )?
⇓
Alternatively, we can
incorporate the scaling directly into the filter, and require that
to prevent overflow.


IIR Filter Scaling
To prevent the output from overflowing in an IIR filter, the condition above still holds: ( M=∞ )
so an initial scaling factor
can be used, or the filter itself can be scaled.
However, it is also necessary to prevent the states from overflowing, and to prevent overflow at
any point in the signal flow graph where the arithmetic hardware would thereby produce errors. To
prevent the states from overflowing, we determine the transfer function from the input to all states
i, and scale the filter such that
Although this method of scaling guarantees no overflows, it is often too conservative. Note that a
worst-case signal is x( n)=sign( h(– n)) ; this input may be extremely unlikely. In the relatively
common situation in which the input is expected to be mainly a single-frequency sinusoid of
unknown frequency and amplitude less than 1, a scaling condition of | H( w)|≤1 is sufficient to
guarantee no overflow. This scaling condition is often used. If there are several potential overflow
locations i in the digital filter structure, the scaling conditions are | Hi( w)|≤1 where Hi( w) is the frequency response from the input to location i in the filter.
Even this condition may be excessively conservative, for example if the input is more-or-less
random, or if occasional overflow can be tolerated. In practice, experimentation and simulation
are often the best ways to optimize the scaling factors in a given application.
For filters implemented in the cascade form, rather than scaling for the entire filter at the
beginning, (which introduces lots of quantization of the input) the filter is usually scaled so that
each stage is just prevented from overflowing. This is best in terms of reducing the quantization
noise. The scaling factors are incorporated either into the previous or the next stage, whichever is
most convenient.
Some heurisitc rules for grouping poles and zeros in a cascade implementation are:
1. Order the poles in terms of decreasing radius. Take the pole pair closest to the unit circle and
group it with the zero pair closest to that pole pair (to minimize the gain in that section). Keep
doing this with all remaining poles and zeros.
2. Order the section with those with highest gain ( argmax| Hi( w)| ) in the middle, and those with
lower gain on the ends.
Leland B. Jackson [link] has an excellent intuitive discussion of finite-precision problems in digital filters. The book by Roberts and Mullis [link] is one of the most thorough in terms of detail.
References
1. Leland B. Jackson. (1989). Digital Filters and Signal Processing. (2nd Edition). Kluwer
Academic Publishers.
2. Richard A. Roberts and Clifford T. Mullis. (1987). Digital Signal Processing. Prentice Hall.
Glossary
Definition: State
the minimum additional information at time simplemath mathml-miitalicsn n, which, along with
all current and future input values, is necessary to compute all future outputs.
Solutions
Index
A
aliases, Impulse-Invariant Design
all-pass, Digital-to-Digital Frequency Transformations
alphabet, Symbolic Signals
amplitude of the frequency response, Restrictions on h(n) to get linear phase
auto-correlation, Auto-correlation-based approach
B
bandlimited, Sampling Period/Rate, Main Concepts
basis for v, Vector Space
bilateral z-transform, Basic Definition of the Z-Transform
bilinear transform, IIR Digital Filter Design via the Bilinear Transform
bit-reversed, Radix-2 decimation-in-time FFT, Radix-2 decimation-in-frequency algorithm
boxcar, Effects of Windowing
butterfly, Additional Simplification, Decimation in frequency
C
canonic, Direct-Form II IIR Filter Structure
cascade, Cascade structures
cascade algorithm, Computing the Scaling Function: The Cascade Algorithm
cauchy, Hilbert Spaces
cauchy-schwarz inequality, Inner Product Space
causal, Pole/Zero Plots and the Region of Convergence
characteristic polynomial, Homogeneous Solution
compact support, Regularity Conditions, Compact Support, and Daubechies' Wavelets
complete, Hilbert Spaces
complex exponential sequence, Complex Exponentials
continuous time fourier transform, Introduction
continuous-time fourier transform, Introduction
control theory, Examples of Pole/Zero Plots
convergent to x, Hilbert Spaces
D
de-noising, DWT Application - De-noising
decimation in frequency, Decimation in frequency
decimation in time, Decimation in time, Radix-4 FFT Algorithms
delayed, Systems in the Time-Domain
deterministic linear prediction, Prony's Method
dft even symmetric, Symmetry
dft odd symmetric, Symmetry
dft-symmetric, Effects of Windowing
difference equation, Systems in the Time-Domain, Introduction, Glossary
digital aliasing, Decimation: sampling rate reduction (by an integer factor M)
dimension, Vector Space
direct method, Solving a LCCDE
direct sum, Vector Space
direct-form fir filter structure, FIR Filter Structures
discrete fourier transform (dft), Sampling DTFT
discrete wavelet transform, Main Concepts
discrete-time sinc function, Discrete-Time Fourier Transform (DTFT)
dithering, Assumption #1
dwt matrix, Finite-Length Sequences and the DWT Matrix
E
extended prony method, Prony's Method
F
flights, Example FFT Code
flow-graph-reversal theorem, Transpose-form FIR filter structures
fourier series, Equations
fourier transform, Basic Definition of the Z-Transform
frequency, Limitations of Fourier Analysis
frequency localization, Time-Frequency Uncertainty Principle
G
gabor transform, Short-time Fourier Transform
generalized linear phase, Restrictions on h(n) to get linear phase
geometric series, Discrete-Time Fourier Transform (DTFT)