2013/02/11 15:15:41 -0600
We will now look more closely at the basic scaling function and wavelet to see when they exist and what their properties are 5, 21, 13, 15, 14, 19, 4. Using the same approach that is used in the theory of differential equations, we will examine the properties of φ(t) by considering the equation of which it is a solution. The basic recursion Equation 3.13 that comes from the multiresolution formulation is

with h(n) being the scaling coefficients and φ(t) being the scaling function which satisfies this equation which is sometimes called the refinement equation, the dilation equation, or the multiresolution analysis equation (MRA).
In order to state the properties accurately, some care has to be taken in specifying just what classes of functions are being considered or are allowed. We will attempt to walk a fine line to present enough detail to be correct but not so much as to obscure the main ideas and results. A few of these ideas were presented in Section: Signal Spaces and a few more will be given in the next section. A more complete discussion can be found in 33, in the introductions to 34, 36, 11, or in any book on function analysis.
There are three classes of signals that we will be using. The most basic is
called L2(R) which contains all functions which have a finite, well-defined
integral of the square:  .
This class is important because it is a generalization of normal Euclidean
geometry and because it gives a simple representation of the energy in a signal.
.
This class is important because it is a generalization of normal Euclidean
geometry and because it gives a simple representation of the energy in a signal.
The next most basic class is L1(R), which requires a finite
integral of the absolute value of the function:
 . This class is
important because one may interchange infinite summations and integrations with
these functions although not necessarily with L2 functions. These classes
of function spaces can be generalized to those with
. This class is
important because one may interchange infinite summations and integrations with
these functions although not necessarily with L2 functions. These classes
of function spaces can be generalized to those with
 and designated Lp.
and designated Lp.
A more general class of signals than any Lp space contains what are
called distributions. These are generalized functions which are not
defined by their having “values" but by the value of an “inner product"
with a normal function. An example of a distribution would be the Dirac
delta function δ(t) where it is defined by the property:  .
.
Another detail to keep in mind is that the integrals used in these definitions are Lebesque integrals which are somewhat more general than the basic Riemann integral. The value of a Lebesque integral is not affected by values of the function over any countable set of values of its argument (or, more generally, a set of measure zero). A function defined as one on the rationals and zero on the irrationals would have a zero Lebesque integral. As a result of this, properties derived using measure theory and Lebesque integrals are sometime said to be true “almost everywhere," meaning they may not be true over a set of measure zero.
Many of these ideas of function spaces, distributions, Lebesque measure, etc. came out of the early study of Fourier series and transforms. It is interesting that they are also important in the theory of wavelets. As with Fourier theory, one can often ignore the signal space classes and can use distributions as if they were functions, but there are some cases where these ideas are crucial. For an introductory reading of this book or of the literature, one can usually skip over the signal space designation or assume Riemann integrals. However, when a contradiction or paradox seems to arise, its resolution will probably require these details.
We will need the Fourier transform of φ(t) which, if it exists, is defined to be Φ

and the discrete-time Fourier transform (DTFT) 23 of h(n) defined to be

where  and n is an integer (n∈Z). If convolution
with h(n) is viewed as a
digital filter, as defined in Section: Analysis - From Fine Scale to Coarse Scale, then the DTFT of h(n) is the
filter's frequency response,
23, 24 which is 2π periodic.
and n is an integer (n∈Z). If convolution
with h(n) is viewed as a
digital filter, as defined in Section: Analysis - From Fine Scale to Coarse Scale, then the DTFT of h(n) is the
filter's frequency response,
23, 24 which is 2π periodic.
If Φ(ω) exits, the defining recursive equation Equation 6.1 becomes

which after iteration becomes

if  and Φ(0) is well defined. This may be
a distribution or it may be a
smooth function depending on H(ω) and, therefore, h(n)33, 4.
This makes
sense only if Φ(0) is well defined. Although Equation 6.1 and
Equation 6.5 are equivalent term-by-term, the requirement of Φ(0) being
well defined and the nature of the limits in the appropriate function spaces
may make one preferable over the other. Notice how the zeros of H(ω)
determine the zeros of Φ(ω).
and Φ(0) is well defined. This may be
a distribution or it may be a
smooth function depending on H(ω) and, therefore, h(n)33, 4.
This makes
sense only if Φ(0) is well defined. Although Equation 6.1 and
Equation 6.5 are equivalent term-by-term, the requirement of Φ(0) being
well defined and the nature of the limits in the appropriate function spaces
may make one preferable over the other. Notice how the zeros of H(ω)
determine the zeros of Φ(ω).
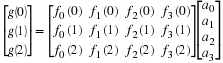
There are two matrices that are particularly important to determining the properties of wavelet systems. The first is the refinement matrixM, which is obtained from the basic recursion equation Equation 6.1 by evaluating φ(t) at integers 22, 6, 7, 29, 30. This looks like a convolution matrix with the even (or odd) rows removed. Two particular submatrices that are used later in Section 6.10 to evaluate φ(t) on the dyadic rationals are illustrated for N=6 by
which we write in matrix form as

with M0 being the 6×6 matrix of the h(n) and
 being 6×1 vectors of integer
samples of φ(t).
In other words, the vector
being 6×1 vectors of integer
samples of φ(t).
In other words, the vector  with entries
φ(k) is the eigenvector of M0 for
an eigenvalue of unity.
with entries
φ(k) is the eigenvector of M0 for
an eigenvalue of unity.
The second submatrix is a shifted version illustrated by

with the matrix being denoted M1. The general refinement matrix M is the infinite matrix of which M0 and M1 are partitions. If the matrix H is the convolution matrix for h(n), we can denote the M matrix by [↓2]H to indicate the down-sampled convolution matrix H. Clearly, for φ(t) to be defined on the dyadic rationals, M0 must have a unity eigenvalue.
A third, less obvious but perhaps more important, matrix is called the transition matrixT and it is built up from the autocorrelation matrix of h(n). The transition matrix is constructed by

This matrix (sometimes called the Lawton matrix) was used by Lawton (who originally called it the Wavelet-Galerkin matrix) 14 to derive necessary and sufficient conditions for an orthogonal wavelet basis. As we will see later in this chapter, its eigenvalues are also important in determining the properties of φ(t) and the associated wavelet system.
Theorem 1 If
φ(t)∈L1
is a solution to the basic recursion equation
Equation 6.1 and if
 , then
, then

The proof of this theorem requires only an interchange in the order of a summation and integration (allowed in L1) but no assumption of orthogonality of the basis functions or any other properties of φ(t) other than a nonzero integral. The proof of this theorem and several of the others stated here are contained in Appendix A.
This theorem shows that, unlike linear constant coefficient differential equations, not just any set of coefficients will support a solution. The coefficients must satisfy the linear equation Equation 6.10. This is the weakest condition on the h(n).
Theorem 2 If φ(t) is an L1 solution to the basic recursion equation
Equation 6.1 with  , and
, and

with Φ(π+2πk)≠0 for some k, then

where Equation 6.11 may have to be a distributional sum. Conversely, if Equation 6.12 is satisfied, then Equation 6.11 is true.
Equation Equation 6.12 is called the fundamental condition, and it is weaker than requiring orthogonality but stronger than Equation 6.10. It is simply a result of requiring the equations resulting from evaluating Equation 6.1 on the integers be consistent. Equation Equation 6.11 is called a partitioning of unity (or the Strang condition or the Shoenberg condition).
A similar theorem by Cavaretta, Dahman and Micchelli 1 and by Jia 10 states that if φ∈Lp and the integer translates of φ(t) form a Riesz basis for the space they span, then ∑nh(2n)=∑nh(2n+1).
Theorem 3 If φ(t) is an L2∩L1 solution to Equation 6.1 and if integer translates of φ(t) are orthogonal as defined by
then
Notice that this does not depend on a particular normalization of φ(t).
If φ(t) is normalized by dividing by the square root of its energy
 , then integer translates of φ(t) are orthonormal
defined by
, then integer translates of φ(t) are orthonormal
defined by

This theorem shows that in order for the solutions of Equation 6.1 to be orthogonal under integer translation, it is necessary that the coefficients of the recursive equation be orthogonal themselves after decimating or downsampling by two. If φ(t) and/or h(n) are complex functions, complex conjugation must be used in Equation 6.13, Equation 6.14, and Equation 6.15.
Coefficients h(n) that satisfy Equation 6.14 are called a quadrature mirror filter (QMF) or conjugate mirror filter (CMF), and the condition Equation 6.14 is called the quadratic condition for obvious reasons.
Corollary 1 Under the assumptions of Theorem Section 6.2, the norm of h(n) is automatically unity.

Not only must the sum of h(n) equal  , but for orthogonality of
the solution, the sum of the squares of h(n) must be one, both
independent of any normalization of φ(t). This unity
normalization of h(n) is the result of the
, but for orthogonality of
the solution, the sum of the squares of h(n) must be one, both
independent of any normalization of φ(t). This unity
normalization of h(n) is the result of the  term in
Equation 6.1.
term in
Equation 6.1.
Corollary 2 Under the assumptions of Theorem Section 6.2,