A single, real-valued random variable is a function (mapping) from the basic space Ω to the real line. That is, to each possible outcome ω of an experiment there corresponds a real value t=X(ω). The mapping induces a probability mass distribution on the real line, which provides a means of making probability calculations. The distribution is described by a distribution function FX. In the absolutely continuous case, with no point mass concentrations, the distribution may also be described by a probability density function fX. The probability density is the linear density of the probability mass along the real line (i.e., mass per unit length). The density is thus the derivative of the distribution function. For a simple random variable, the probability distribution consists of a point mass pi at each possible value ti of the random variable. Various m-procedures and m-functions aid calculations for simple distributions. In the absolutely continuous case, a simple approximation may be set up, so that calculations for the random variable are approximated by calculations on this simple distribution.
Often we have more than one random variable. Each can be considered separately, but usually they have some probabilistic ties which must be taken into account when they are considered jointly. We treat the joint case by considering the individual random variables as coordinates of a random vector. We extend the techniques for a single random variable to the multidimensional case. To simplify exposition and to keep calculations manageable, we consider a pair of random variables as coordinates of a two-dimensional random vector. The concepts and results extend directly to any finite number of random variables considered jointly.
As a starting point, consider a simple example in which the probabilistic interaction between two random quantities is evident.
Two campus jobs are open. Two juniors and three seniors apply. They seem equally
qualified, so it is decided to select them by chance. Each combination of two is
equally likely. Let X be the number of juniors selected (possible values 0, 1, 2) and
Y be the number of seniors selected (possible values 0, 1, 2). However there are only
three possible pairs of values for  , or
, or  . Others
have zero probability, since they are impossible. Determine the probability for each of the
possible pairs.
. Others
have zero probability, since they are impossible. Determine the probability for each of the
possible pairs.
There are  equally likely pairs. Only one pair can be both juniors. Six
pairs can be one of each. There are
equally likely pairs. Only one pair can be both juniors. Six
pairs can be one of each. There are  ways to select pairs of seniors. Thus
ways to select pairs of seniors. Thus

These probabilities add to one, as they must, since this exhausts the mutually exclusive possibilities. The probability of any other combination must be zero. We also have the distributions for the random variables conisidered individually.

We thus have a joint distribution and two individual or marginal distributions.
We formalize as follows:
A pair  of random variables considered jointly is treated as the pair
of coordinate functions for a two-dimensional random vector
of random variables considered jointly is treated as the pair
of coordinate functions for a two-dimensional random vector  . To each ω∈Ω, W assigns the pair of real numbers
. To each ω∈Ω, W assigns the pair of real numbers  , where
X(ω)=t and Y(ω)=u. If we represent the pair of values
, where
X(ω)=t and Y(ω)=u. If we represent the pair of values  as the point
as the point
 on the plane, then
on the plane, then  , so that
, so that

is a mapping from the basic space Ω to the plane R2. Since W is a function, all mapping ideas extend. The inverse mapping W–1 plays a role analogous to that of the inverse mapping X–1 for a real random variable. A two-dimensional vector W is a random vector iff W–1(Q) is an event for each reasonable set (technically, each Borel set) on the plane.
A fundamental result from measure theory ensures
 is a random vector iff each of the coordinate functions X and Y is a random variable.
is a random vector iff each of the coordinate functions X and Y is a random variable.
In the selection example above, we model  (the number of juniors selected) and
Y (the number of seniors selected) as random variables. Hence the vector-valued
function
(the number of juniors selected) and
Y (the number of seniors selected) as random variables. Hence the vector-valued
function
In a manner parallel to that for the single-variable case, we obtain a mapping of probability mass from the basic space to the plane. Since W–1(Q) is an event for each reasonable set Q on the plane, we may assign to Q the probability mass

Because of the preservation of set operations by inverse mappings as in the single-variable case,
the mass assignment determines
PXY as a probability measure on the subsets of the plane R2. The argument
parallels that for the single-variable case. The result is the probability distribution
induced by  . To determine the probability that the
vector-valued function
. To determine the probability that the
vector-valued function  takes on a (vector) value in region Q, we simply
determine how much induced probability mass is in that region.
takes on a (vector) value in region Q, we simply
determine how much induced probability mass is in that region.
To determine  , we determine the region for which the
first coordinate value (which we call t) is between one and three and the second
coordinate value (which we call u) is greater than zero. This corresponds to
the set Q of points on the plane with 1≤t≤3 and u>0. Gometrically,
this is the strip on the plane bounded by (but not including) the horizontal axis and by the
vertical lines t=1 and t=3 (included). The problem is to determine how much
probability mass lies in that strip. How this is acheived depends upon the nature of the
distribution and how it is described.
, we determine the region for which the
first coordinate value (which we call t) is between one and three and the second
coordinate value (which we call u) is greater than zero. This corresponds to
the set Q of points on the plane with 1≤t≤3 and u>0. Gometrically,
this is the strip on the plane bounded by (but not including) the horizontal axis and by the
vertical lines t=1 and t=3 (included). The problem is to determine how much
probability mass lies in that strip. How this is acheived depends upon the nature of the
distribution and how it is described.
As in the single-variable case, we have a distribution function.
Definition
The joint distribution function FXY for  is
given by
is
given by
This means that  is equal to the probability mass in the region Qtu
on the plane such that the first coordinate is less than or equal to t and the second
coordinate is less than or equal to u. Formally, we may write
is equal to the probability mass in the region Qtu
on the plane such that the first coordinate is less than or equal to t and the second
coordinate is less than or equal to u. Formally, we may write
Now for a given point (a,b), the region Qab is the set of points (t,u) on the plane which are on or to the left of the vertical line through (t,0)and on or below the horizontal line through (0,u) (see Figure 1 for specific point t=a,u=b). We refer to such regions as semiinfinite intervals on the plane.
The theoretical result quoted in the real variable case extends to ensure that a distribution on the plane is determined uniquely by consistent assignments to the semiinfinite intervals Qtu. Thus, the induced distribution is determined completely by the joint distribution function.
Distribution function for a discrete random vector
The induced distribution consists of point masses. At point  in the range of
in the range of
 there is probability mass
there is probability mass  . As in the general case, to determine
. As in the general case, to determine  we determine how much probability
mass is in the region. In the discrete case (or in any case where there are point mass
concentrations) one must be careful to note whether or not the boundaries are
included in the region, should there be mass concentrations on the boundary.
we determine how much probability
mass is in the region. In the discrete case (or in any case where there are point mass
concentrations) one must be careful to note whether or not the boundaries are
included in the region, should there be mass concentrations on the boundary.
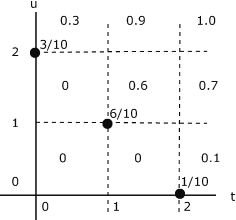
The probability distribution is quite simple. Mass 3/10 at (0,2), 6/10 at (1,1), and
1/10 at (2,0). This distribution is plotted in Figure 8.2. To determine (and visualize)
the joint distribution function, think of moving the point  on the plane. The
region Qtu is a giant “sheet” with corner at
on the plane. The
region Qtu is a giant “sheet” with corner at  . The value of
. The value of  is the amount of probability covered by the sheet. This value is constant over any grid
cell, including the left-hand and lower boundariies, and is the value taken on at the lower
left-hand corner of the cell. Thus, if
is the amount of probability covered by the sheet. This value is constant over any grid
cell, including the left-hand and lower boundariies, and is the value taken on at the lower
left-hand corner of the cell. Thus, if  is in any of the
three squares on the lower left hand part of the diagram, no probability mass is covered
by the sheet with corner in the cell. If
is in any of the
three squares on the lower left hand part of the diagram, no probability mass is covered
by the sheet with corner in the cell. If  is on or in the square having probability
6/10 at the lower left-hand corner, then the sheet covers that probability, and the value of
is on or in the square having probability
6/10 at the lower left-hand corner, then the sheet covers that probability, and the value of
 . The situation in the other cells may be checked out by this procedure.
. The situation in the other cells may be checked out by this procedure.
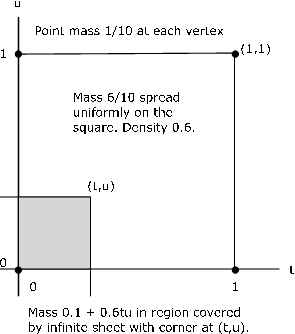
Distribution function for a mixed distribution
The pair  produces a mixed distribution as follows (see Figure 8.3)
produces a mixed distribution as follows (see Figure 8.3)
Point masses 1/10 at points (0,0), (1,0), (1,1), (0,1)
Mass 6/10 spread uniformly over the unit square with these vertices
The joint distribution function is zero in the second, third, and fourth quadrants.
If the point  is in the square or on the left and lower boundaries, the
sheet covers the point mass at (0,0) plus 0.6 times the area covered within the square.
Thus in this region
is in the square or on the left and lower boundaries, the
sheet covers the point mass at (0,0) plus 0.6 times the area covered within the square.
Thus in this region

If the pont  is above the square (including its upper boundary) but to the
left of the line t=1, the sheet covers two point masses plus the portion of the
mass in the square to the left of the vertical line through
is above the square (including its upper boundary) but to the
left of the line t=1, the sheet covers two point masses plus the portion of the
mass in the square to the left of the vertical line through  . In this case
. In this case

If the point  is to the right of the square (including its boundary) with
0≤u<1, the sheet covers two point masses and the portion of the mass in the
square below the horizontal line through
is to the right of the square (including its boundary) with
0≤u<1, the sheet covers two point masses and the portion of the mass in the
square below the horizontal line through  , to give
, to give

If  is above and to the right of the square (i.e., both 1≤t and 1≤u).
then all probability mass is covered and
is above and to the right of the square (i.e., both 1≤t and 1≤u).
then all probability mass is covered and  in this region.
in this region.
If the joint distribution for a random vector is known, then the distribution for each of the component random variables may be determined. These are known as marginal distributions. In general, the converse is not true. However, if the component random variables form an independent pair, the treatment in that case shows that the marginals determine the joint distribution.
To begin the investigation, note that

Thus

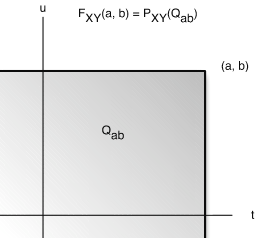
This may be interpreted with the aid of Figure 8.4. Consider the sheet for point  .
.
If we push the point up vertically, the upper boundary of Qtu is pushed up until eventually
all probability mass on or to the left of the vertical line through  is included. This
is the total probability that X≤t. Now FX(t) describes probability mass on the line.
The probability mass described by FX(t) is the same as the total joint probability mass on
or to the left of the vertical line through
is included. This
is the total probability that X≤t. Now FX(t) describes probability mass on the line.
The probability mass described by FX(t) is the same as the total joint probability mass on
or to the left of the vertical line through  . We may think of the mass in the half
plane being projected onto the horizontal line to give the marginal distribution for X.
A parallel argument holds for the marginal for Y<
. We may think of the mass in the half
plane being projected onto the horizontal line to give the marginal distribution for X.
A parallel argument holds for the marginal for Y<