The probability that real random variable X takes a value in a set M of real numbers is interpreted as the likelihood that the observed value X(ω) on any trial will lie in M. Historically, this idea of likelihood is rooted in the intuitive notion that if the experiment is repeated enough times the probability is approximately the fraction of times the value of X will fall in M. Associated with this interpretation is the notion of the average of the values taken on. We incorporate the concept of mathematical expectation into the mathematical model as an appropriate form of such averages. We begin by studying the mathematical expectation of simple random variables, then extend the definition and properties to the general case. In the process, we note the relationship of mathematical expectation to the Lebesque integral, which is developed in abstract measure theory. Although we do not develop this theory, which lies beyond the scope of this study, identification of this relationship provides access to a rich and powerful set of properties which have far reaching consequences in both application and theory.
The notion of mathematical expectation is closely related to the idea of a weighted mean, used
extensively in the handling of numerical data. Consider the arithmetic average  of the following ten numbers: 1, 2, 2, 2, 4, 5, 5, 8, 8, 8, which is given by
of the following ten numbers: 1, 2, 2, 2, 4, 5, 5, 8, 8, 8, which is given by

Examination of the ten numbers to be added shows that five distinct values are included. One of the ten, or the fraction 1/10 of them, has the value 1, three of the ten, or the fraction 3/10 of them, have the value 2, 1/10 has the value 4, 2/10 have the value 5, and 3/10 have the value 8. Thus, we could write

The pattern in this last expression can be stated in words: Multiply each possible value by the fraction of the numbers having that value and then sum these products. The fractions are often referred to as the relative frequencies. A sum of this sort is known as a weighted average.
In general, suppose there are n numbers  to be averaged, with
m≤n distinct values
to be averaged, with
m≤n distinct values
 . Suppose f1 have value t1,
f2 have value
. Suppose f1 have value t1,
f2 have value  have value tm. The fi must add to n. If we
set pi=fi/n, then the fraction pi is called the relative frequency of those numbers in the
set which have the value ti,1≤i≤m. The average
have value tm. The fi must add to n. If we
set pi=fi/n, then the fraction pi is called the relative frequency of those numbers in the
set which have the value ti,1≤i≤m. The average  of the n numbers
may be written
of the n numbers
may be written

In probability theory, we have a similar averaging process in which the relative frequencies of the various possible values of are replaced by the probabilities that those values are observed on any trial.
Definition. For a simple random variable X with values  and corresponding probabilities
and corresponding probabilities  , the mathematical expectation, designated
E[X], is the probability weighted average of the values taken on by X. In symbols
, the mathematical expectation, designated
E[X], is the probability weighted average of the values taken on by X. In symbols

Note that the expectation is determined by the distribution. Two quite different random variables may have the same distribution, hence the same expectation. Traditionally, this average has been called the mean, or the mean value, of the random variable X.
Since X=aIE=0IEc+aIE, we have  .
.
For X a constant c, X=cIΩ, so that E[c]=cP(Ω)=c.
If  then
then  ,
so that
,
so that

Mechanical interpretation
In order to aid in visualizing an essentially abstract system, we have employed the notion of probability as mass. The distribution induced by a real random variable on the line is visualized as a unit of probability mass actually distributed along the line. We utilize the mass distribution to give an important and helpful mechanical interpretation of the expectation or mean value. In Example 6 in "Mathematical Expectation: General Random Variables", we give an alternate interpretation in terms of mean-square estimation.
Suppose the random variable X has values  , with
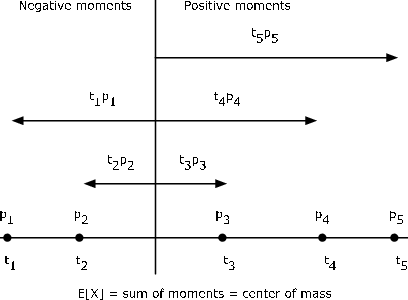
, with  . This produces a probability mass distribution, as shown in Figure 1, with point mass concentration
in the amount of pi at the point ti. The expectation is
. This produces a probability mass distribution, as shown in Figure 1, with point mass concentration
in the amount of pi at the point ti. The expectation is

Now |ti| is the distance of point mass pi from the origin, with pi to the left of the origin iff ti is negative. Mechanically, the sum of the products tipi is the moment of the probability mass distribution about the origin on the real line. From physical theory, this moment is known to be the same as the product of the total mass times the number which locates the center of mass. Since the total mass is one, the mean value is the location of the center of mass. If the real line is viewed as a stiff, weightless rod with point mass pi attached at each value ti of X, then the mean value μX is the point of balance. Often there are symmetries in the distribution which make it possible to determine the expectation without detailed calculation.
Let X be the number of spots which turn up on a throw of a simple six-sided die. We suppose each number is equally likely. Thus the values are the integers one through six, and each probability is 1/6. By definition

Although the calculation is very simple in this case, it is really not necessary. The probability distribution places equal mass at each of the integer values one through six. The center of mass is at the midpoint.
A child is told she may have one of four toys. The prices are $2.50. $3.00, $2.00, and $3.50, respectively. She choses one, with respective probabilities 0.2, 0.3, 0.2, and 0.3 of choosing the first, second, third or fourth. What is the expected cost of her selection?
For a simple random variable, the mathematical expectation is determined as the dot product of the value matrix with the probability matrix. This is easily calculated using MATLAB.
X = [2 2.5 3 3.5]; % Matrix of values (ordered) PX = 0.1*[2 2 3 3]; % Matrix of probabilities EX = dot(X,PX) % The usual MATLAB operation EX = 2.8500 Ex = sum(X.*PX) % An alternate calculation Ex = 2.8500 ex = X*PX' % Another alternate ex = 2.8500
Expectation and primitive form
The definition and treatment above assumes X is in canonical form, in which case

We wish to ease this restriction to canonical form.
Suppose simple random variable X is in a primitive form

We show that

Before a formal verification, we begin with an example which exhibits the essential pattern. Establishing the general case is simply a matter of appropriate use of notation.

Inspection shows the distinct possible values of X to be 1, 2, or 3. Also,
so that
Now
To establish the general pattern, consider  .
We identify the distinct set of values contained
in the set
.
We identify the distinct set of values contained
in the set  . Suppose these are t1<t2<⋯<tn.
For any value ti in the range, identify the index set Ji of those j such
that cj=ti. Then the terms
. Suppose these are t1<t2<⋯<tn.
For any value ti in the range, identify the index set Ji of those j such
that cj=ti. Then the terms

By the additivity of probability

Since for each j∈Ji we have cj=ti, we have

— □
Thus, the defining expression for expectation thus holds for X in a primitive form.
An alternate approach to obtaining the expectation from a primitive form is to use the csort operation to determine the distribution of X from the coefficients and probabilities of the primitive form.
Suppose X in a primitive form is
with respective probabilities

c = [1 2 1 3 2 2 1 3 2 1]; % Matrix of coefficients
pc = 0.01*[8 11 6 13 5 8 12 7 14 16]; % Matrix of probabilities
EX = c*pc'
EX = 1.7800 % Direct solution
[X,PX] = csort(c,pc); % Determination of dbn for X
disp([X;PX]')
1.0000 0.4200
2.0000 0.3800
3.0000 0.2000
Ex = X*PX' % E[X] from distribution
Ex = 1.7800
Linearity
The result on primitive forms may be used to establish the linearity of mathematical expectation for simple random variables. Because of its fundamental importance, we work through the verification in some detail.
Suppose  and
and  (both in canonical form). Since
(both in canonical form). Since

we have

Note that IAiIBj=IAiBj and  . The
class of these sets for all possible pairs
. The
class of these sets for all possible pairs  forms a partition. Thus, the last
summation expresses Z=X+Y in a primitive form. Because of the result on primitive forms, above, we have
forms a partition. Thus, the last
summation expresses Z=X+Y in a primitive form. Because of the result on primitive forms, above, we have


We note that for each i and for each j

Hence, we may write
