In the unit on Conditional Independence , the concept of conditional independence of events is examined and used to model a variety of common situations. In this unit, we investigate a more general concept of conditional independence, based on the theory of conditional expectation. This concept lies at the foundations of Bayesian statistics, of many topics in decision theory, and of the theory of Markov systems. We examine in this unit, very briefly, the first of these. In the unit on Markov Sequences, we provide an introduction to the third.
The definition of conditional independence of events is based on a product rule which
may be expressed in terms of conditional expectation, given an event. The pair
 is conditionally independent, given C, iff
is conditionally independent, given C, iff

If we let A=X–1(M) and B=Y–1(N), then IA=IM(X) and IB=IN(Y). It would be reasonable to consider the pair  conditionally independent,
given event C, iff the product rule
conditionally independent,
given event C, iff the product rule

holds for all reasonable M and N (technically, all Borel M and N). This suggests a possible extension to conditional expectation, given a random vector. We examine the following concept.
Definition. The pair {X,Y} is conditionally independent, givenZ,
designated  , iff
, iff

Remark. Since it is not necessary that  , or Z be real valued, we
understand that the sets M and N are on the codomains for X and Y, respectively.
For example, if X is a three dimensional random vector, then M is a subset of R3.
, or Z be real valued, we
understand that the sets M and N are on the codomains for X and Y, respectively.
For example, if X is a three dimensional random vector, then M is a subset of R3.
As in the case of other concepts, it is useful to identify some key properties, which we refer to by the numbers used in the table in Appendix G. We note two kinds of equivalences. For example, the following are equivalent.
(CI1)

(CI5)

Because the indicator functions are special Borel functions, (CI1) is a special case of (CI5).
To show that (CI1) implies (CI5), we need to use linearity, monotonicity, and monotone
convergence in a manner similar to that used in extending properties (CE1) to (CE6) for
conditional expectation.
A second kind of equivalence involves various patterns. The properties (CI1), (CI2), (CI3),
and (CI4) are equivalent, with (CI1) being the defining condition for  .
.
(CI1)

(CI2)

(CI3)

(CI4)

As an example of the kinds of argument needed to verify these equivalences, we show the equivalence of (CI1) and (CI2).
(CI1) implies (CI2). Set  and
and  . If we show
. If we show

then by the uniqueness property (E5b) for expectation we may assert  Using the defining property (CE1) for conditional
expectation, we have
Using the defining property (CE1) for conditional
expectation, we have

On the other hand, use of (CE1), (CE8), (CI1), and (CE1) yields



which establishes the desired equality.
(CI2) implies (CI1). Using (CE9), (CE8), (CI2), and (CE8), we have



Use of property (CE8) shows that (CI2) and (CI3) are equivalent. Now just as (CI1) extends to (CI5), so also (CI3) is equivalent to
(CI6)

Property (CI6) provides an important interpretation of conditional independence:
 is the best mean-square estimator for
is the best mean-square estimator for  , given knowledge of
Z. The condition
, given knowledge of
Z. The condition  implies that additional knowledge about
Y does not modify that best estimate. This interpretation is often the most useful
as a modeling assumption.
implies that additional knowledge about
Y does not modify that best estimate. This interpretation is often the most useful
as a modeling assumption.
Similarly, property (CI4) is equivalent to
(CI8)
Property (CI7) is an alternate way of expressing (CI6). Property (CI9) is just a convenient way of expressing the other conditions.
The additional properties in Appendix G are useful in a variety of contexts, particularly in establishing properties of Markov systems. We refer to them as needed.
In the classical approach to statistics, a fundamental problem is to obtain information about the population distribution from the distribution in a simple random sample. There is an inherent difficulty with this approach. Suppose it is desired to determine the population mean μ. Now μ is an unknown quantity about which there is uncertainty. However, since it is a constant, we cannot assign a probability such as P(a<μ≤b). This has no meaning.
The Bayesian approach makes a fundamental change of viewpoint. Since the population mean is a quantity about which there is uncertainty, it is modeled as a random variable whose value is to be determined by experiment. In this view, the population distribution is conceived as randomly selected from a class of such distributions. One way of expressing this idea is to refer to a state of nature. The population distribution has been “selected by nature” from a class of distributions. The mean value is thus a random variable whose value is determined by this selection. To implement this point of view, we assume
The value of the parameter (say μ in the discussion above) is a “realization” of a parameter random variable H. If two or more parameters are sought (say the mean and variance), they may be considered components of a parameter random vector.
The population distribution is a conditional distribution, given the value of H.
The Bayesian model
If X is a random variable whose distribution is the population distribution and
H is the parameter random variable, then  have a joint distribution.
have a joint distribution.
For each u in the range of H, we have a conditional distribution for X, given H=u.
We assume a prior distribution for H. This is based on previous experience.
We have a random sampling process, given H:
i.e.,  is conditionally iid, given H.
Let
is conditionally iid, given H.
Let  and consider the joint conditional distribution function
and consider the joint conditional distribution function


If X has conditional density, given H, then a similar product rule holds.
Population proportion
We illustrate these ideas with one of the simplest, but most important, statistical problems: that of determining the proportion of a population which has a particular characteristic. Examples abound. We mention only a few to indicate the importance.
The proportion of a population of voters who plan to vote for a certain candidate.
The proportion of a given population which has a certain disease.
The fraction of items from a production line which meet specifications.
The fraction of women between the ages eighteen and fifty five who hold full time jobs.
The parameter in this case is the proportion p who meet the criterion. If sampling is
at random, then the sampling process is equivalent to a sequence of Bernoulli trials. If
H is the parameter random variable and Sn is the number of “successes”
in a sample of size n, then the conditional distribution for Sn, given H=u,
is binomial  . To see this, consider
. To see this, consider

Anaysis is carried out for each fixed u as in the ordinary Bernoulli case. If

we have the result

The objective
We seek to determine the best mean-square estimate of H, given Sn=k. Two steps must be taken:
If H=u, we know  . Sampling gives Sn=k. We
make a Bayesian reversal to get an exression for
. Sampling gives Sn=k. We
make a Bayesian reversal to get an exression for  .
.
To complete the task, we must assume a prior distribution for H on the basis of prior knowledge, if any.
The Bayesian reversal
Since  is an event with positive probability, we use the definition of the
conditional expectation, given an event, and the law of total probability (CE1b) to obtain
is an event with positive probability, we use the definition of the
conditional expectation, given an event, and the law of total probability (CE1b) to obtain


A prior distribution for H
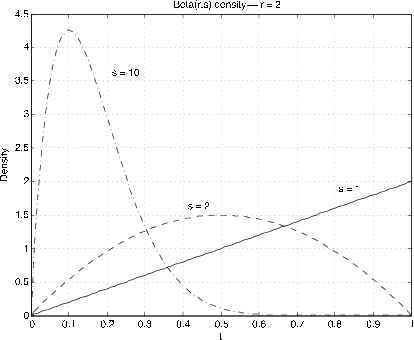
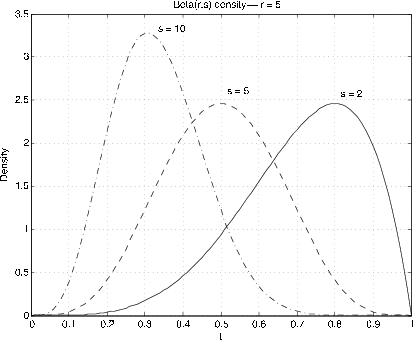
The beta  distribution (see Appendix G), proves to be a “natural” choice
for this purpose. Its range is the unit interval, and by proper choice of parameters
distribution (see Appendix G), proves to be a “natural” choice
for this purpose. Its range is the unit interval, and by proper choice of parameters  the density function can be given a variety of forms (see Figures 1 and 2).
the density function can be given a variety of forms (see Figures 1 and 2).
 .
.
 .
.Its analysis is based on the integrals

For H∼ beta  , the density is given by
, the density is given by

For  , fH has a maximum at (r–1)/(r+s–2). For
, fH has a maximum at (r–1)/(r+s–2). For
 positive integers, fH is a polynomial on
positive integers, fH is a polynomial on  , so that determination
of the distribution function is easy. In any case, straightforward integration, using
the integral formula above, shows
, so that determination
of the distribution function is easy. In any case, straightforward integration, using
the integral formula above, shows

If the prior distribution for H is beta  we may complete the determination
of
we may complete the determination
of  as follows.
as follows.


We may adapt the analysis above to show that H is conditionally beta 