2013/02/11 14:10:19 -0600
Both the mathematics and the practical interpretations of wavelets seem to
be best served by using the concept of resolution
8, 7, 6, 3 to define the effects of changing scale.
To do this, we will start with a scaling function rather than directly with the wavelet ψ(t). After the scaling
function is defined from the concept of resolution, the wavelet functions
will be derived from it. This chapter will give a rather intuitive
development of these ideas, which will be followed by more rigorous
arguments in Chapter: The Scaling Function and Scaling Coefficients, Wavelet and Wavelet Coefficients.
rather than directly with the wavelet ψ(t). After the scaling
function is defined from the concept of resolution, the wavelet functions
will be derived from it. This chapter will give a rather intuitive
development of these ideas, which will be followed by more rigorous
arguments in Chapter: The Scaling Function and Scaling Coefficients, Wavelet and Wavelet Coefficients.
This multiresolution formulation is obviously designed to represent signals where a single event is decomposed into finer and finer detail, but it turns out also to be valuable in representing signals where a time-frequency or time-scale description is desired even if no concept of resolution is needed. However, there are other cases where multiresolution is not appropriate, such as for the short-time Fourier transform or Gabor transform or for local sine or cosine bases or lapped orthogonal transforms, which are all discussed briefly later in this book.
In order to talk about the collection of functions or signals that can be represented by a sum of scaling functions and/or wavelets, we need some ideas and terminology from functional analysis. If these concepts are not familiar to you or the information in this section is not sufficient, you may want to skip ahead and read Chapter: The Scaling Function and Scaling Coefficients, Wavelet and Wavelet Coefficients or 11.
A function space is a linear vector space (finite or infinite dimensional) where the vectors are functions, the scalars are real numbers (sometime complex numbers), and scalar multiplication and vector addition are similar to that done in Equation 2.1. The inner product is a scalar a obtained from two vectors, f(t) and g(t), by an integral. It is denoted

with the range of integration depending on the signal class being considered. This inner product defines a norm or “length" of a vector which is denoted and defined by

which is a simple generalization of the geometric operations and definitions in three-dimensional Euclidean space. Two signals (vectors) with non-zero norms are called orthogonal if their inner product is zero. For example, with the Fourier series, we see that sin(t) is orthogonal to sin(2t).
A space that is particularly important in signal processing is call L2(R). This is the space of all functions f(t) with a well defined integral of the square of the modulus of the function. The “L" signifies a Lebesque integral, the “2" denotes the integral of the square of the modulus of the function, and R states that the independent variable of integration t is a number over the whole real line. For a function g(t) to be a member of that space is denoted: g∈L2(R) or simply g∈L2.
Although most of the definitions and derivations are in terms of signals that are in L2, many of the results hold for larger classes of signals. For example, polynomials are not in L2 but can be expanded over any finite domain by most wavelet systems.
In order to develop the wavelet expansion described in Equation 2.5, we
will need the idea of an expansion set or a basis set. If we start with
the vector space of signals, S, then if any f(t)∈S
can be expressed as  , the set of
functions φk(t) are called an expansion set for the space S. If the representation is unique, the set is a basis. Alternatively,
one could start with the expansion set or basis set and define the space
S as the set of all functions that can be expressed by
, the set of
functions φk(t) are called an expansion set for the space S. If the representation is unique, the set is a basis. Alternatively,
one could start with the expansion set or basis set and define the space
S as the set of all functions that can be expressed by  . This is called the span of the basis
set. In several cases, the signal spaces that we will need are actually
the closure of the space spanned by the basis set. That means the
space contains not only all signals that can be expressed by a
linear combination of the basis functions, but also the signals which are
the limit of these infinite expansions. The closure of a space is usually
denoted by an over-line.
. This is called the span of the basis
set. In several cases, the signal spaces that we will need are actually
the closure of the space spanned by the basis set. That means the
space contains not only all signals that can be expressed by a
linear combination of the basis functions, but also the signals which are
the limit of these infinite expansions. The closure of a space is usually
denoted by an over-line.
In order to use the idea of multiresolution, we will start by defining the scaling function and then define the wavelet in terms of it. As described for the wavelet in the previous chapter, we define a set of scaling functions in terms of integer translates of the basic scaling function by
The subspace of L2(R) spanned by these functions is defined as

for all integers k from minus infinity to infinity. The over-bar denotes closure. This means that

One can generally increase the size of the subspace spanned by changing the time scale of the scaling functions. A two-dimensional family of functions is generated from the basic scaling function by scaling and translation by

whose span over k is

for all integers k∈Z. This means that if f(t)∈Vj, then it can be expressed as

For j>0, the span can be larger since φj,k(t) is narrower and is translated in smaller steps. It, therefore, can represent finer detail. For j<0, φj,k(t) is wider and is translated in larger steps. So these wider scaling functions can represent only coarse information, and the space they span is smaller. Another way to think about the effects of a change of scale is in terms of resolution. If one talks about photographic or optical resolution, then this idea of scale is the same as resolving power.
In order to agree with our intuitive ideas of scale or resolution, we formulate the basic requirement of multiresolution analysis (MRA) 6 by requiring a nesting of the spanned spaces as
or

with
The space that contains high resolution signals will contain those of lower resolution also.
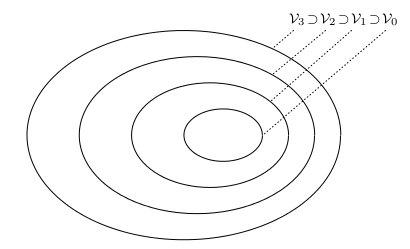
Because of the definition of Vj, the spaces have to satisfy a natural scaling condition

which insures elements in a space are simply scaled versions of the elements in the next space. The relationship of the spanned spaces is illustrated in Figure 3.1.
The nesting of the spans of  , denoted by Vj
and shown in Equation 3.9 and Equation 3.12 and graphically illustrated in
Figure 3.1, is achieved by requiring that φ(t)∈V1, which means that if φ(t) is in V0, it is also in
V1, the space spanned by φ(2t). This means φ(t)
can be expressed in terms of a weighted sum of shifted φ(2t) as
, denoted by Vj
and shown in Equation 3.9 and Equation 3.12 and graphically illustrated in
Figure 3.1, is achieved by requiring that φ(t)∈V1, which means that if φ(t) is in V0, it is also in
V1, the space spanned by φ(2t). This means φ(t)
can be expressed in terms of a weighted sum of shifted φ(2t) as

where the coefficients h(n) are a sequence of real or perhaps complex
numbers called the scaling function coefficients (or the scaling filter or
the scaling vector) and the  maintains the norm of the scaling
function with the scale of two.
maintains the norm of the scaling
function with the scale of two.
This recursive equation is fundamental to the theory of the scaling functions and is, in some ways, analogous to a differential equation with coefficients h(n) and solution φ(t) that may or may not exist or be unique. The equation is referred to by different names to describe different interpretations or points of view. It is called the refinement equation, the multiresolution analysis (MRA) equation, or the dilation equation.
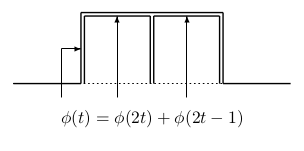
The Haar scaling function is the simple unit-width, unit-height pulse function φ(t) shown in Figure 3.2, and it is obvious that φ(2t) can be used to construct φ(t) by

which means Equation 3.13 is satisfied for coefficients  .
.
The triangle scaling function (also a first order spline)
in Figure 3.2 satisfies Equation 3.13 for
 , and the Daubechies scaling function
shown in the first part of
, and the Daubechies scaling function
shown in the first part of
 (a) | 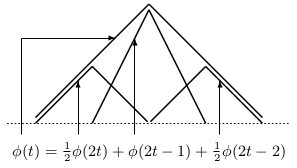 (b) |
Figure: Daubechies Scaling Functions satisfies Equation 3.13 for h={0.483,0.8365,0.2241,–0.1294} as do all scaling functions for their corresponding scaling coefficients. Indeed, the design of wavelet systems is the choosing of the coefficients h(n) and that is developed later.
The important features of a signal can better be described or parameterized, not by using φj,k(t) and increasing j to increase the size of the subspace spanned by the scaling functions, but by defining a slightly different set of functions ψj,k(t) that span the differences between the spaces spanned by the various scales of the scaling function. These functions are the wavelets discussed in the introduction of this book.
There are several advantages to requiring that the scaling functions and wavelets be orthogonal. Orthogonal basis functions allow simple calculation of expansion coefficients and have a Parseval's theorem that allows a partitioning of the signal energy in the wavelet transform domain. The orthogonal complement of Vj in Vj+1 is defined as Wj. This means that all members of Vj are orthogonal to all members of Wj. We require
for all appropriate j,k,ℓ∈Z.
The relationship of the various subspaces can be seen from the following expressions. From Equation 3.9 we see that we may start at any Vj, say at j=0, and write
We now define the wavelet spanned subspace W0 such that

which extends to

In general this gives
when V0 is the initial space spanned by the scaling function ϕ(t–k). Figure 3.3 pictorially shows the nesting of the scaling function spaces Vj for different scales j and how the wavelet spaces are the disjoint differences (except for the zero element) or, the orthogonal complements.
The scale of the initial space is arbitrary and could be chosen at a higher resolution of, say, j=10 to give
or at a lower resolution such as j=–5 to give